Contact and proximity sensing are vital functions for robots and drones interacting with the world. In close proximity to humans, they need the ability to anticipate contact and take appropriate action, which requires a sensor that can detect pre-contact forces and prevent contact from occurring. A team from the University of Queensland, Australia, created drone sensors inspired by animal whiskers, which, in the animal kingdom, are incredibly effective in helping animals sense obstacles, movement and vibrations.
“Whiskers offer two types of measurement not available in current platforms: contact sensing and fluid velocity sensing,” said Pauline Pounds of the research team. “The importance of contact sensing is obvious. The velocity sensing, however, is unique to machines and animals that move through fluids. By sensing the relative wind velocity, a drone can better compensate for disturbances and understand its own intrinsic motion within the flow.”
While previous work had been done to produce whiskers for terrestrial robots, the team wanted to build on these studies by developing rotor force sensors for quadrotor drones by placing a semi-rigid fiber on a load plate atop a multi-element load cell. By incorporating lightweight extruded fibers onto a tessellated array of miniaturized versions of the load cell, they believed a dense sensing fur could be constructed.
In construction, the sensing element and communication system were tightly integrated, and each whisker was compact enough to be incorporated into artificial skin. A picture of the embedded whisker sensor on PCB can be seen below in Figure 1.
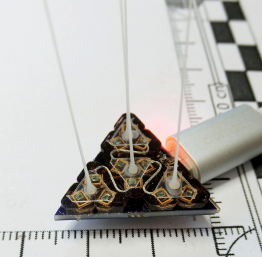
Figure 1: Miniature Embedded Whisker Sensor on PCB
For the fiber fabrication, the team determined that polymer fibers with a 3D-printed base allowed for easier production and long, thin fibers with a longer lifetime and reparability. This construction can be seen below in Figure 2.
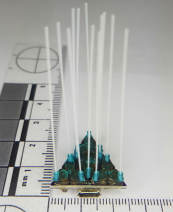
Figure 2: Hybrid Printed Extruded Array
To test the whiskers’ performance, the team wanted to verify that each whisker of the sensor array could detect both magnitude and direction of applied force at its tip. Three sets of experiments were used to test contact, pre-contact and velocity measurement of the whiskers, and in each experiment, the sensor was oriented so that the predominant axis of applied forces ran along a parallel edge to the circuit board – the least sensitive configuration.
After putting the whiskers through all three experiments, the performance either met or exceeded the team’s goals. While further testing is needed, the excellent sensitivity to contact and fluid motion means the whiskers are a viable option for aerial robotics applications.
“The sensors have been developed to a high-level of functionality, so for some applications they are already being used,” said Pounds. “For example, we've installed them on a small ground robot called the iRat to interact with lab rats for rodent psychology studies.”
Future work, Pounds said, will explore putting the sensors on flying platforms to extract in-flight data about the motion of the aircraft and its proximity to obstacles. An eventual goal is to further refine the whisker design to replicate the vibration sensing capability of mammals.
For more information on drones, visit the IEEE Xplore Digital Library.